From Research Insights to a Living Ambient Avatar
From Research Insights to a Living Ambient Avatar
From Research Insights to a Living Ambient Avatar
How I designed an adaptive, human-centered ambient avatar for automated vehicle HMIs in immersive environments.
How I designed an adaptive, human-centered ambient avatar for automated vehicle HMIs in immersive environments.
How I designed an adaptive, human-centered ambient avatar for automated vehicle HMIs in immersive environments.
Company
Company
Company
Duration & Year
Duration & Year
Duration & Year
My Role
My Role
My Role
Team
Team
Team
Spiegel Institut
Spiegel Institut
Spiegel Institut
6 months (2025)
6 months (2025)
6 months (2025)
UX Researcher
UX Researcher
UX Researcher
Context
Context
Context
This case study stems from my master thesis in UX Design on the design of ambient avatars within automated vehicles scenarios. Through an iterative process combining user research, expert insights, and user testing in MR and VR, a concept is evaluated that enhances passenger perception.
This case study stems from my master thesis in UX Design on the design of ambient avatars within automated vehicles scenarios. Through an iterative process combining user research, expert insights, and user testing in MR and VR, a concept is evaluated that enhances passenger perception.
This case study stems from my master thesis in UX Design on the design of ambient avatars within automated vehicles scenarios. Through an iterative process combining user research, expert insights, and user testing in MR and VR, a concept is evaluated that enhances passenger perception.
Problem
Problem
Problem
The Communication Breakdown: Designing for Perception in Automated Vehicles
The Communication Breakdown: Designing for Perception in Automated Vehicles
The Communication Breakdown: Designing for Perception in Automated Vehicles
In self driven vehicle, passengers often find it difficult to interpret the vehicle’s intentions, leading to uncertainty and panic.
In self driven vehicle, passengers often find it difficult to interpret the vehicle’s intentions, leading to uncertainty and panic.
In self driven vehicle, passengers often find it difficult to interpret the vehicle’s intentions, leading to uncertainty and panic.
I faced several challenges:
I faced several challenges:
Communicate intent clearly.
Function across VR and MR.
To foster trust, not distraction.
Communicate intent clearly.
Function across VR and MR.
To foster trust, not distraction.
Communicate intent clearly.
Function across VR and MR environments.
To foster trust, not distraction.
Research Methodology
Research Methodology
Research Methodology
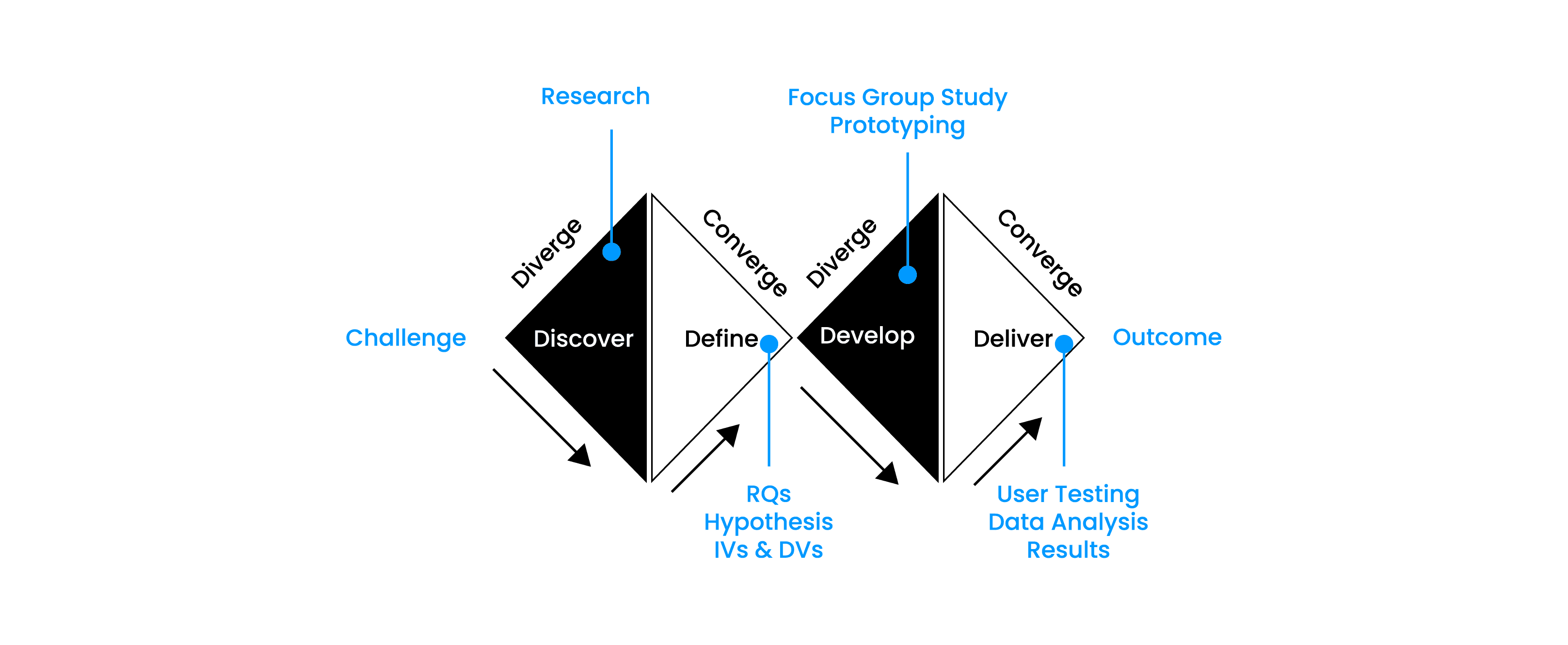
I followed the Double Diamond design process to structure the overall research and interaction design.
I followed the Double Diamond design process to structure the overall research and interaction design.
I followed the Double Diamond design process to structure the overall research and interaction design.
Focus Group Workshop
Focus Group Workshop
Focus Group Workshop
For a strong foundation for the ambient avatar concept, I conducted a workshop with experts from Spiegel Institut GmbH. The goal was to process from scratch, involve key stakeholders early, and minimize personal biases in concept development.
For a strong foundation for the ambient avatar concept, I conducted a workshop with experts from Spiegel Institut GmbH. The goal was to process from scratch, involve key stakeholders early, and minimize personal biases in concept development.
For a strong foundation for the ambient avatar concept, I conducted a workshop with experts from Spiegel Institut GmbH. The goal was to process from scratch, involve key stakeholders early, and minimize personal biases in concept development.
My Role
My Role
My Role
Participants
Participants
Participants
Domain
Domain
Domain
Duration
Duration
Duration
Facilitator
Facilitator
Facilitator
5 Experts
5 Experts
5 Experts
HMI, UX ,PSYC
HMI, UX ,PSYC
HMI, UX ,PSYC
60 min
60 min
60 min
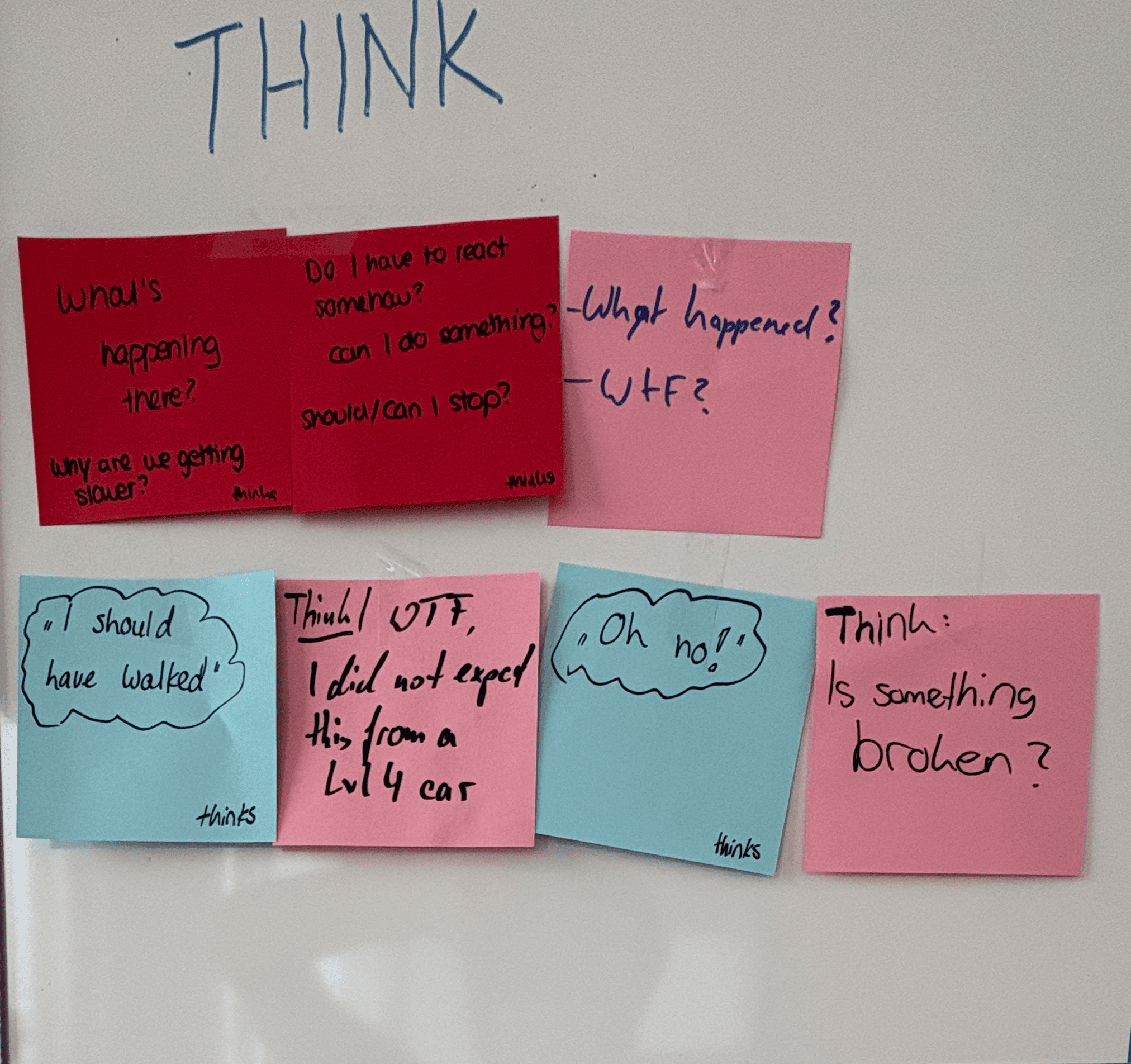
Empathy & Problem Statements
Empathy & Problem Statements
Empathy & Problem Statements
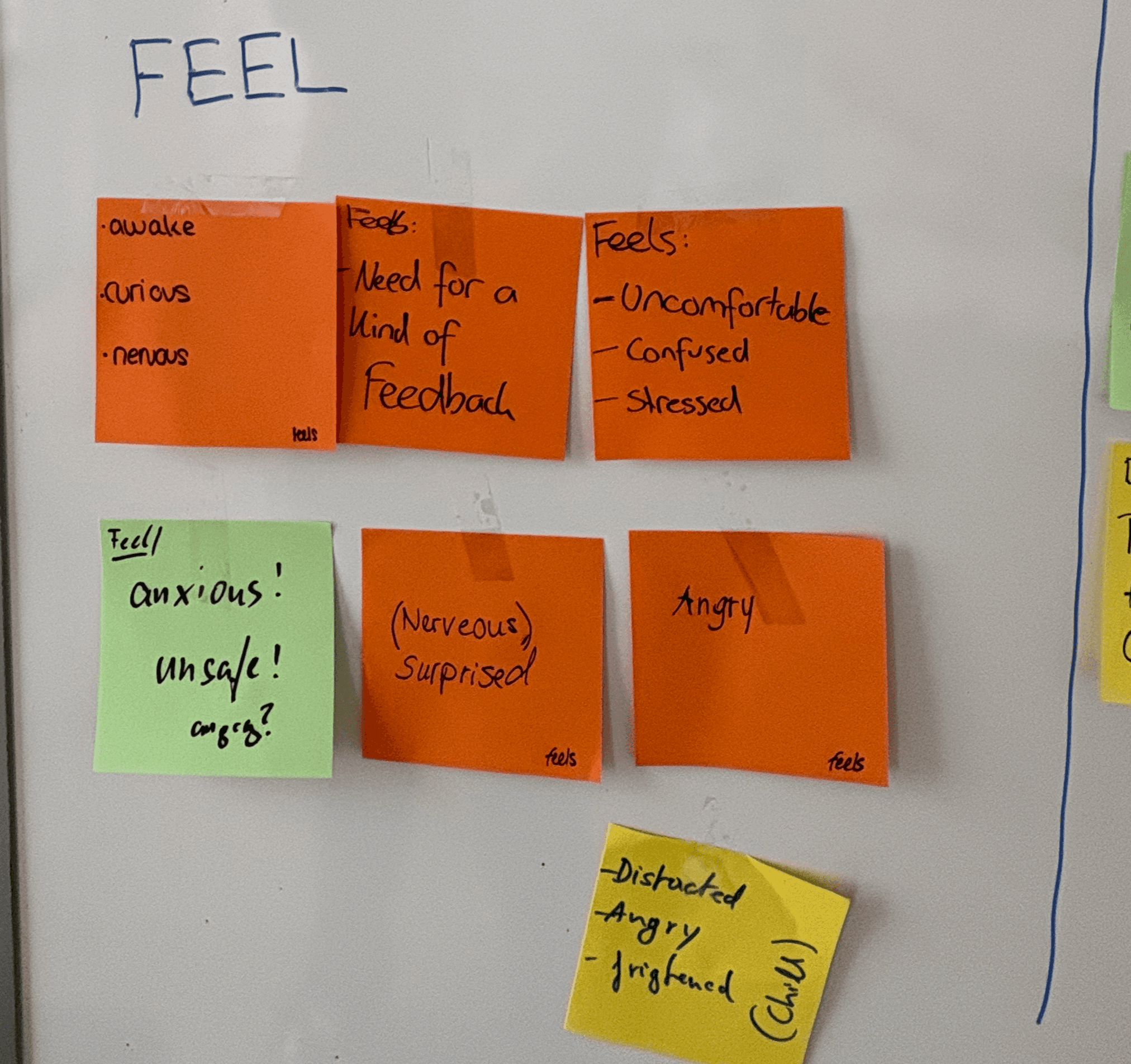
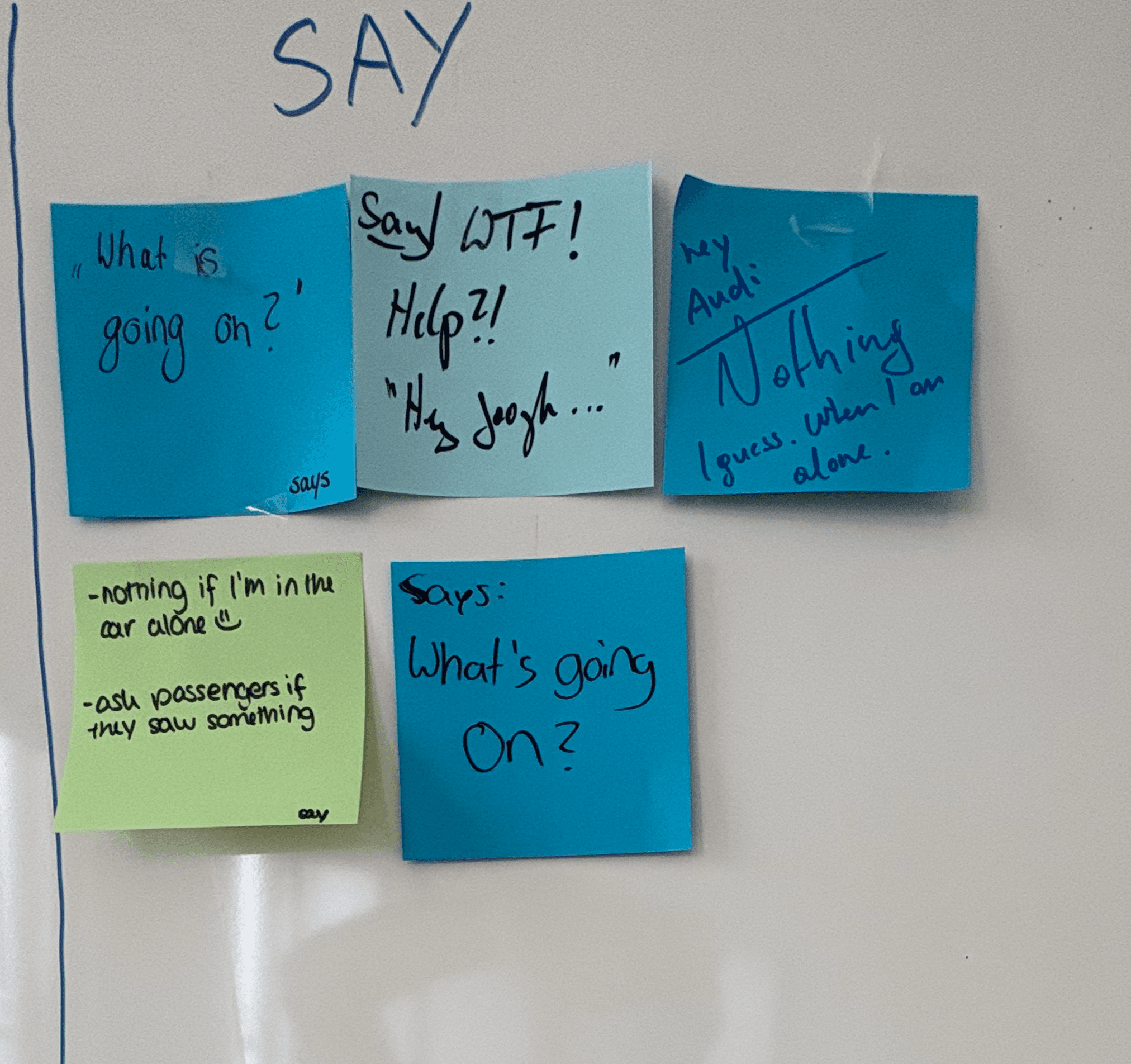
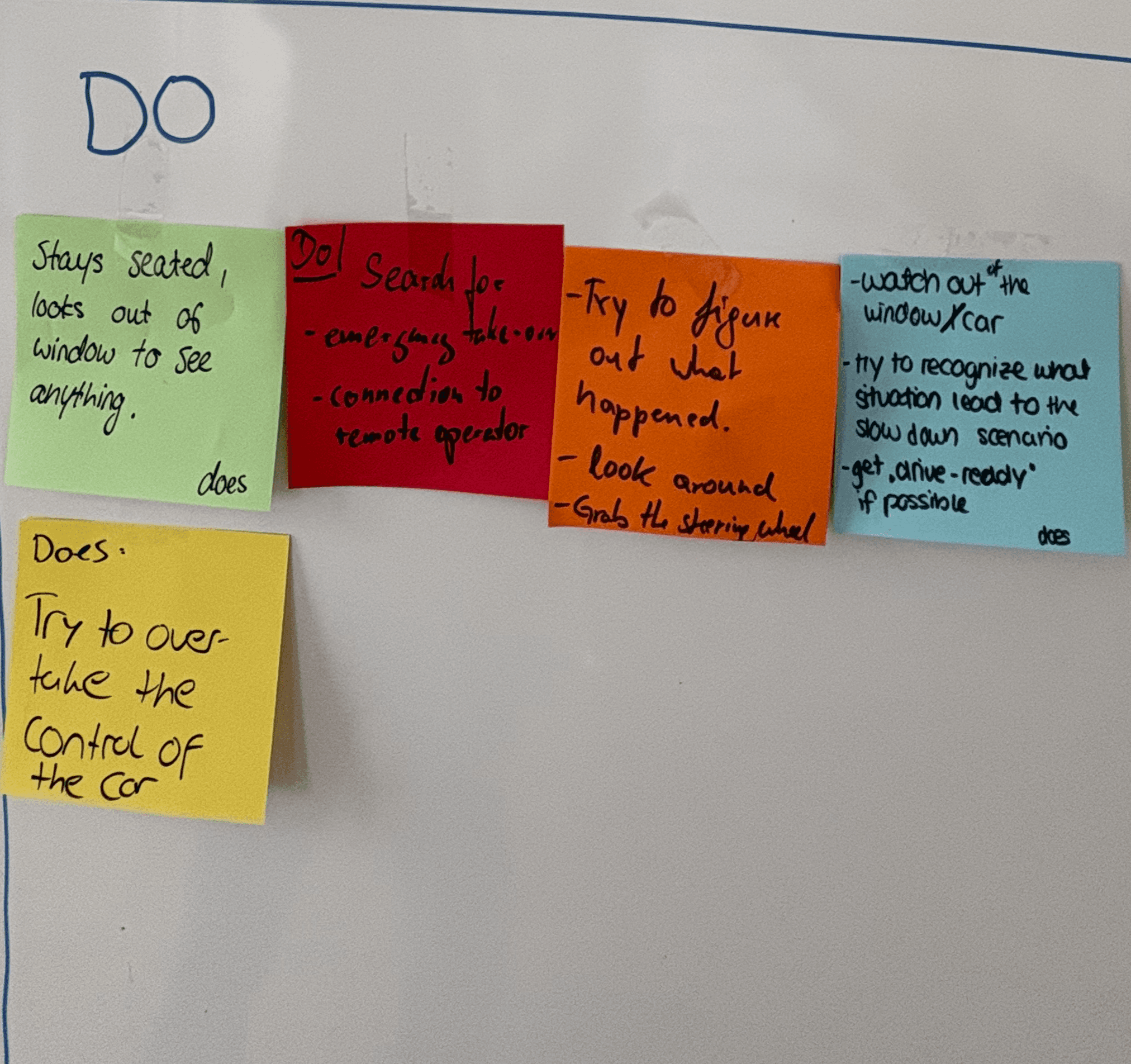
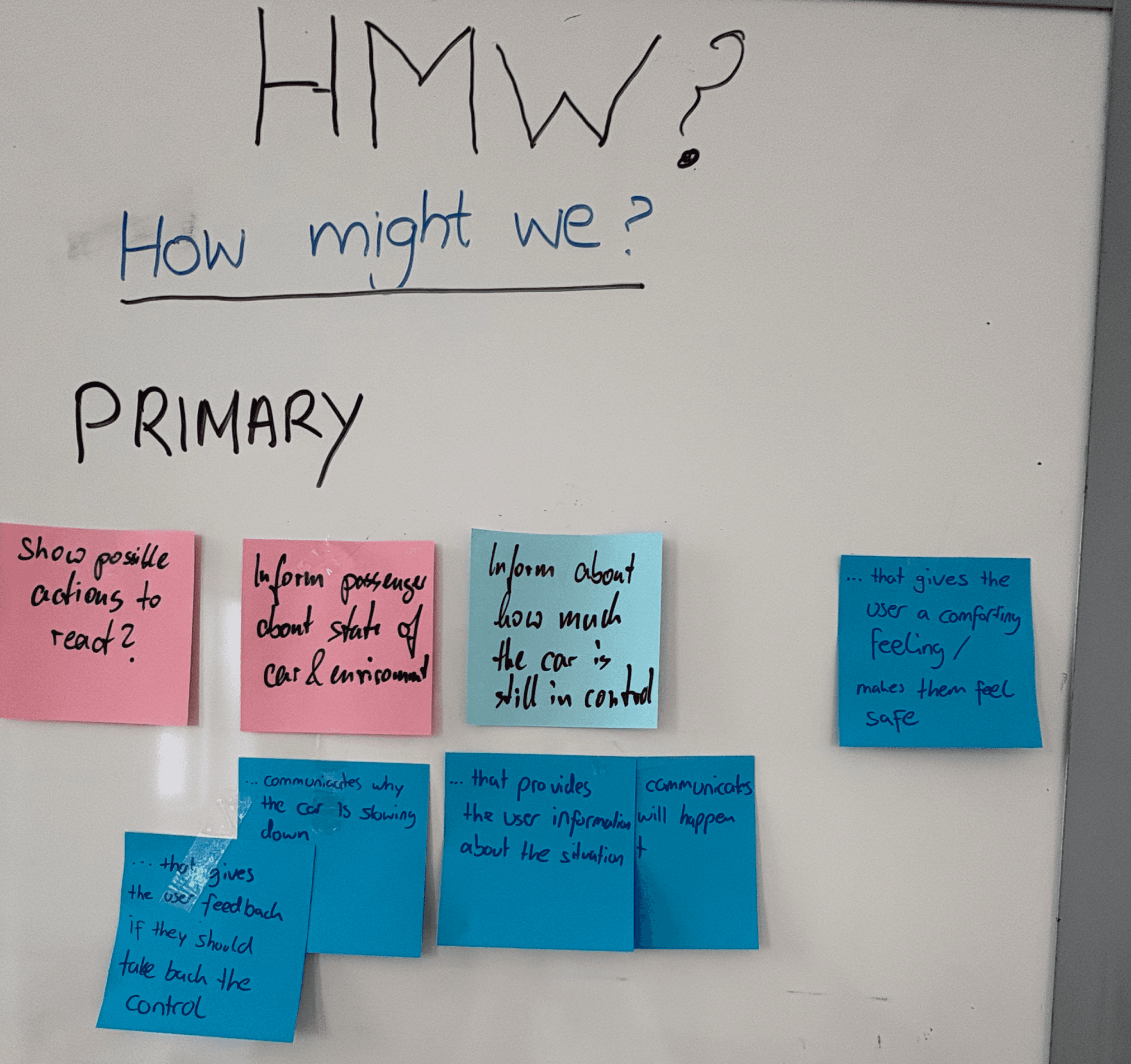
In Empathy phase, experts were asked to think like passengers who are travelling in automated vehicle and write how they Think, Feel, Say, DO and form How Might We questions on the basis of those highlighted problems.
In Empathy phase, experts were asked to think like passengers who are travelling in automated vehicle and write how they Think, Feel, Say, DO and form How Might We questions on the basis of those highlighted problems.
In Empathy phase, experts were asked to think like passengers who are travelling in automated vehicle and write how they Think, Feel, Say, DO and form How Might We questions on the basis of those highlighted problems.
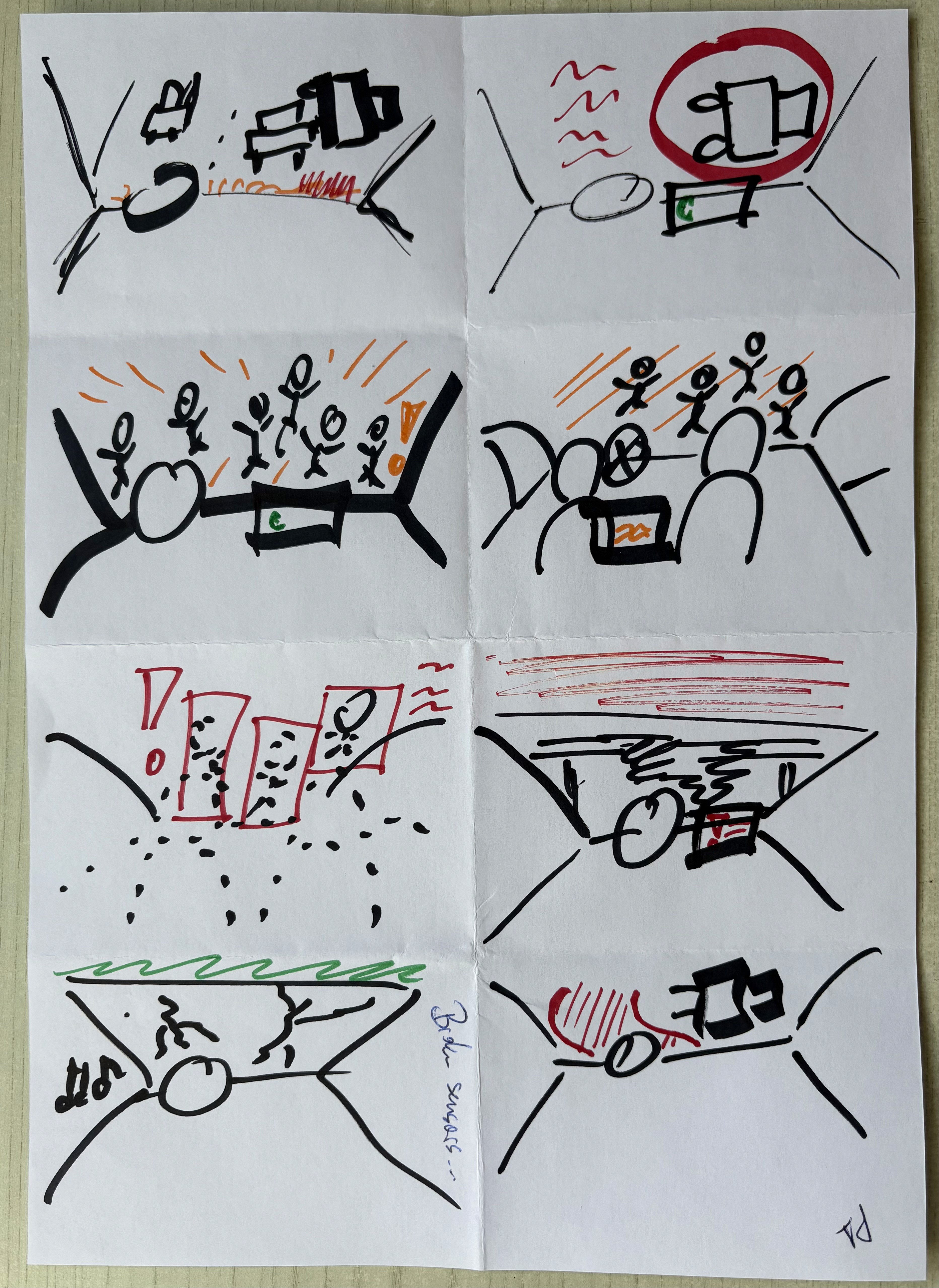
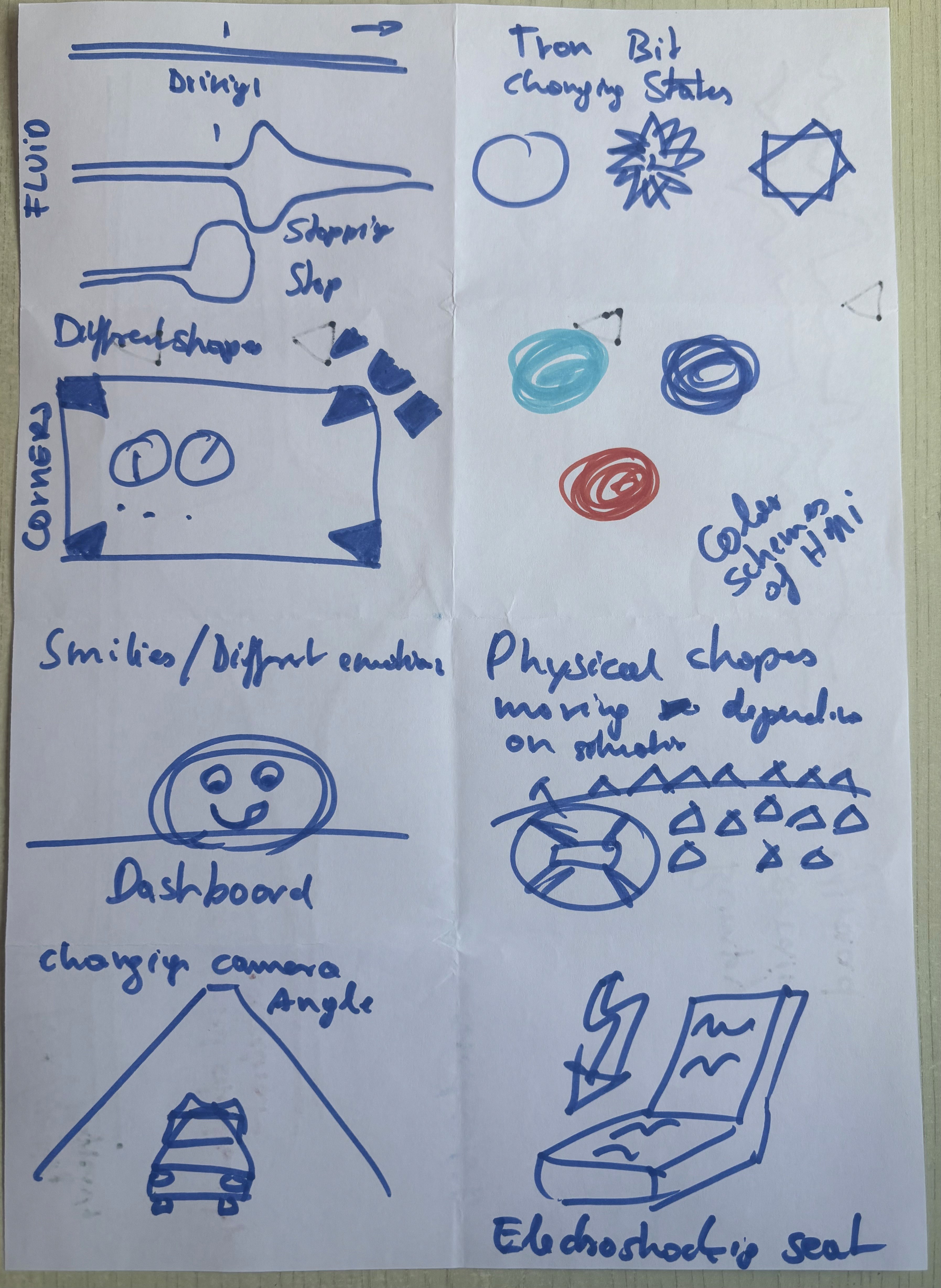
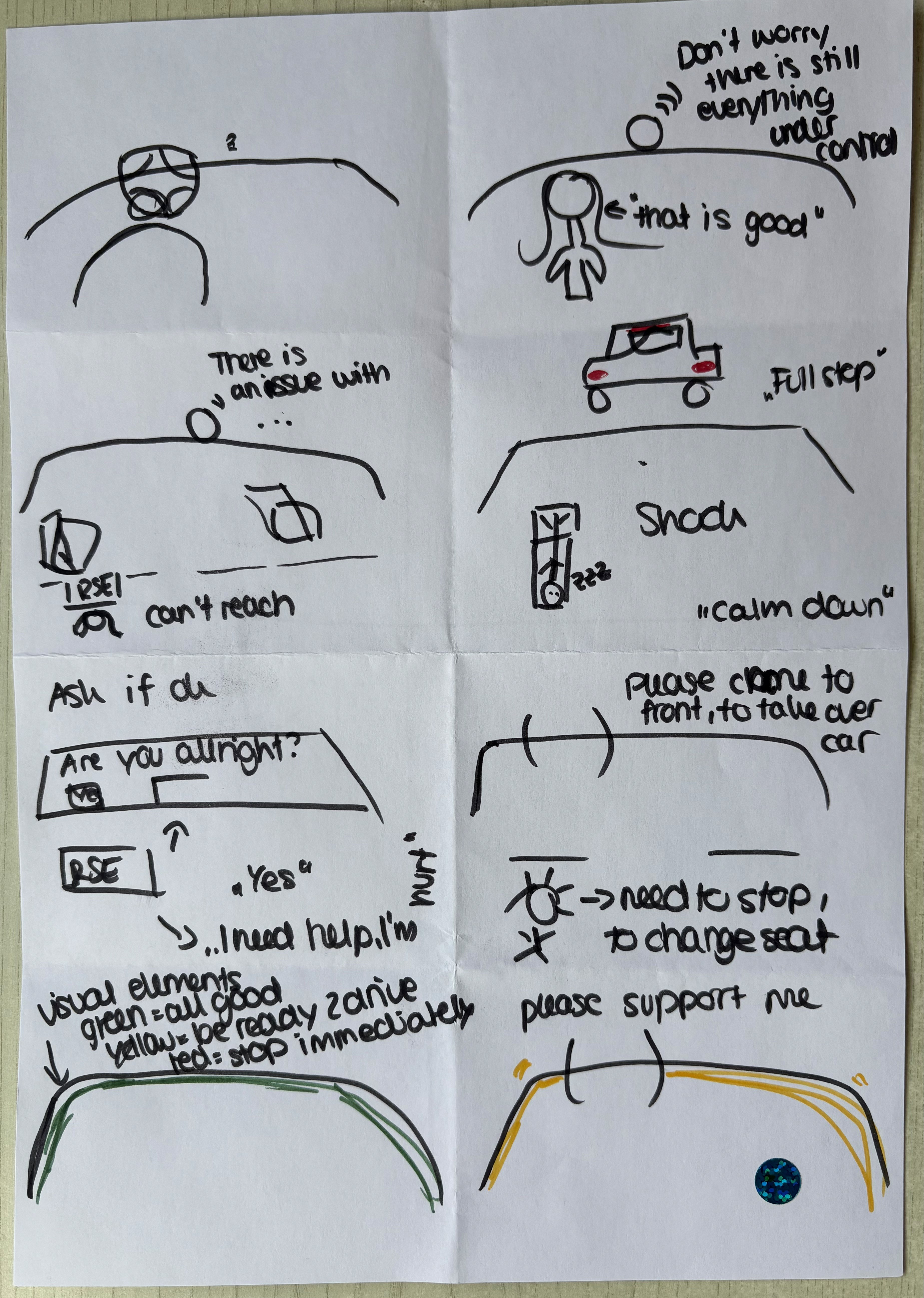
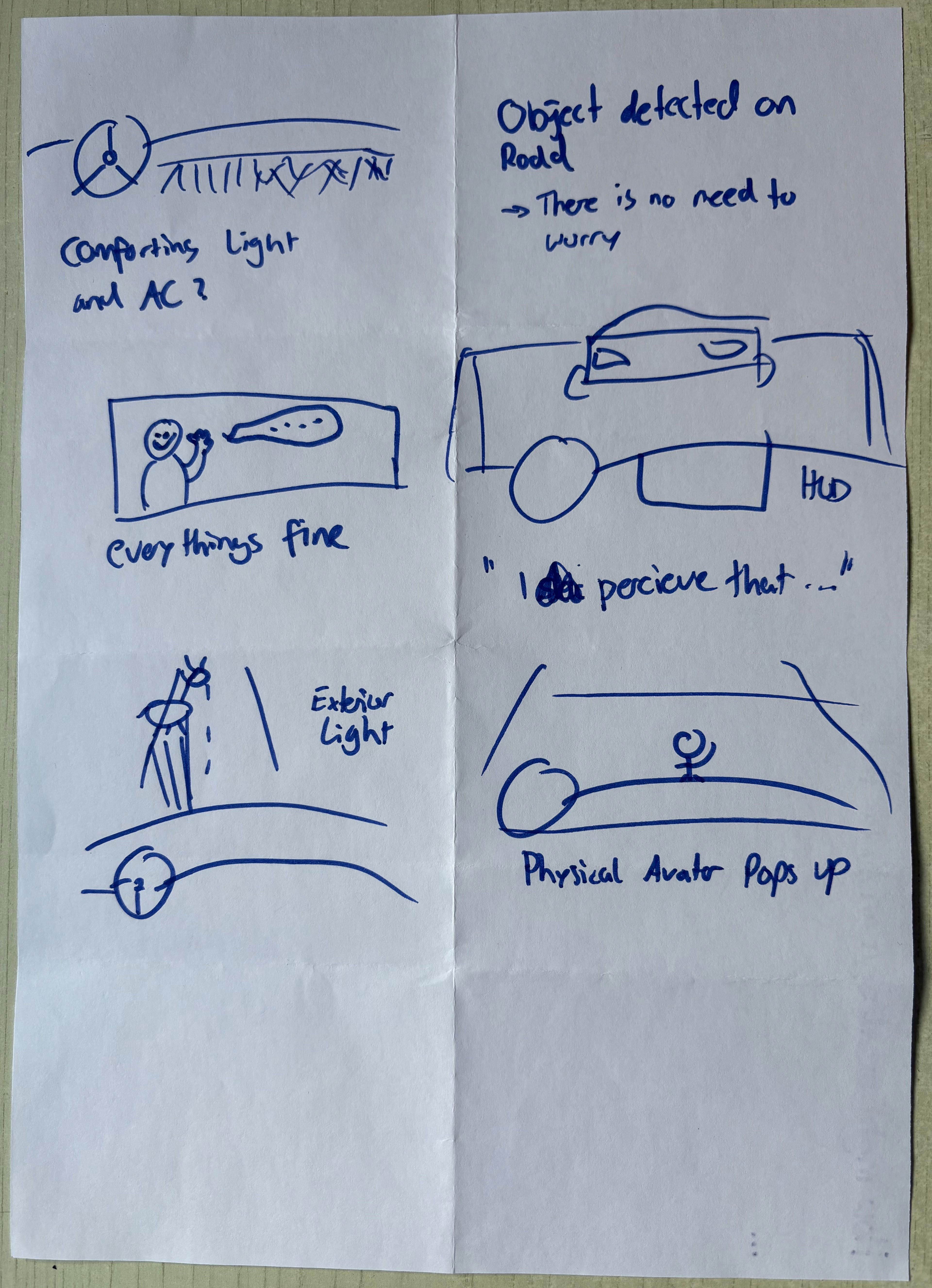
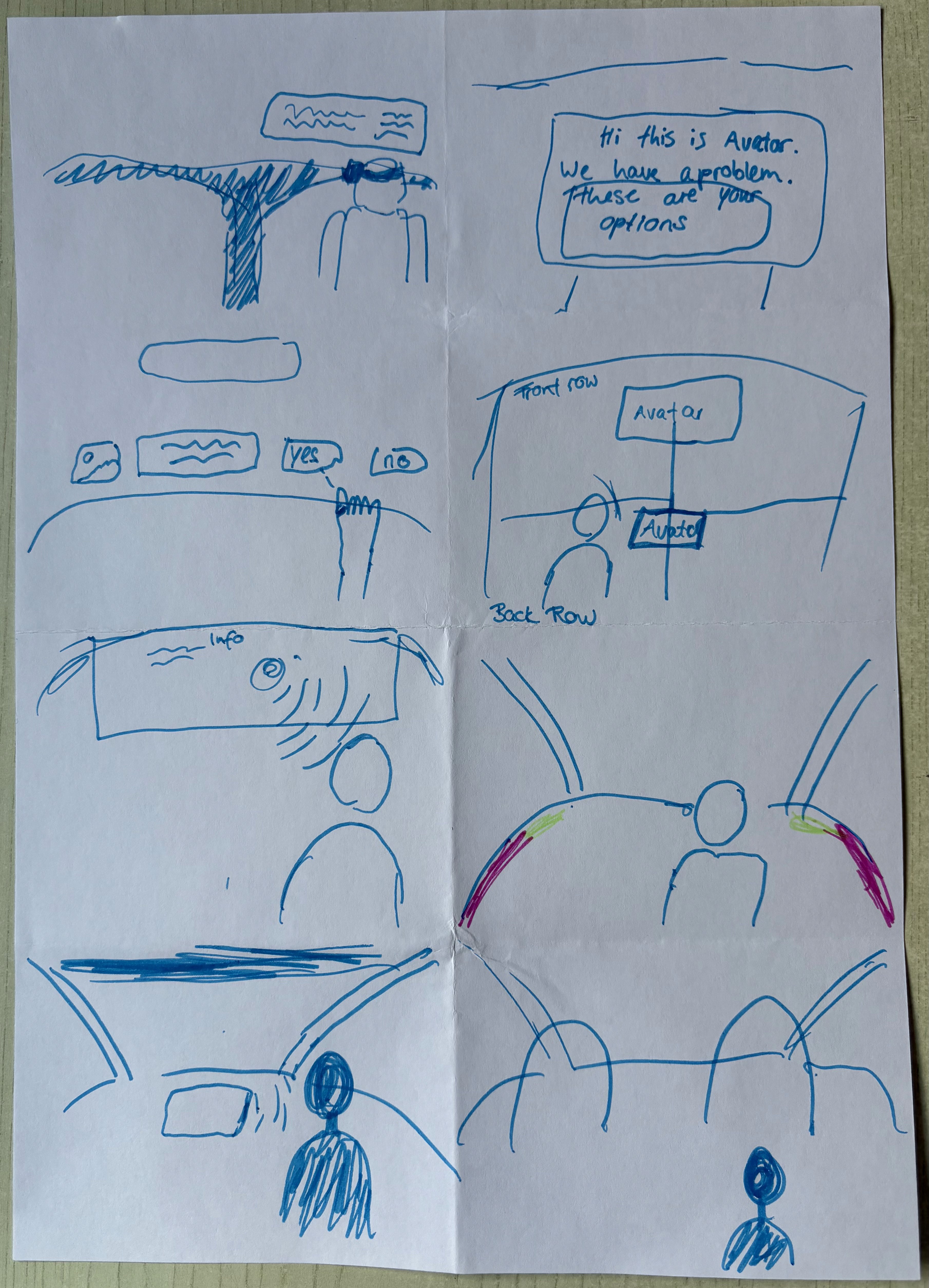
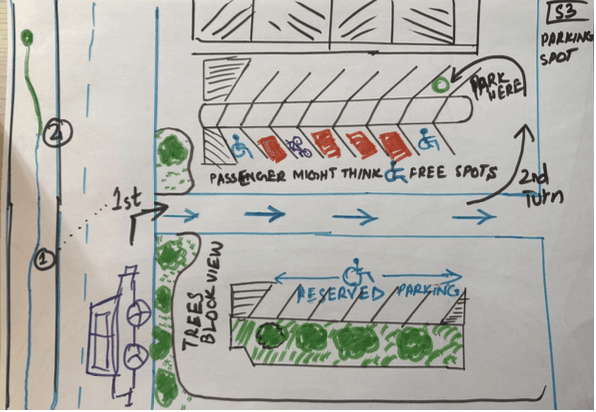
Brain Storming: Crazy 8s
Brain Storming: Crazy 8s
Experts were assigned task to fold paper in 8 small frames and make 1 concept in 1 min to answer the HWM questions through their sketches. Time pressure helped them to not influenced by others concepts.
Experts were assigned task to fold paper in 8 small frames and make 1 concept in 1 min to answer the HWM questions through their sketches. Time pressure helped them to not influenced by others concepts.
Experts were assigned task to fold paper in 8 small frames and make 1 concept in 1 min to answer the HWM questions through their sketches. Time pressure helped them to not influenced by others concepts.

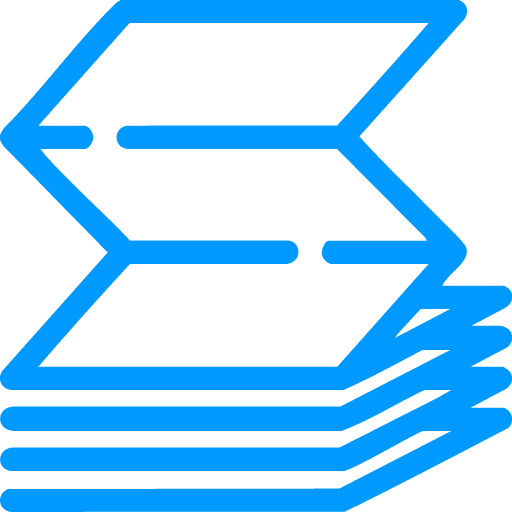
Selection & Prioritisation
Selection & Prioritisation
2 Concepts were selected based on mutual voting and discussion.
2 Concepts were selected based on mutual voting and discussion.
2 Concepts were selected based on mutual voting and discussion.

Low-Fi Prototype
Low-Fi Prototype
Concept Challenges
Concept Challenges
Display real time obstacle & upcoming obstacles.
Colour scheme to show the urgency without panic.
Position avatar in the car.
Purposed Solutions
Purposed Solutions
The loop in avatar can anticipate about the upcoming obstacle, while the size address the distance from obstacle.
Avatar display in rear screen or along the dashboard and should always stay ON.
The loop in avatar can anticipate about the upcoming obstacle, while the size address the distance from obstacle.
Avatar display in rear screen or along the dashboard and should always stay ON.
Concept Development
Concept Development
Concept Development
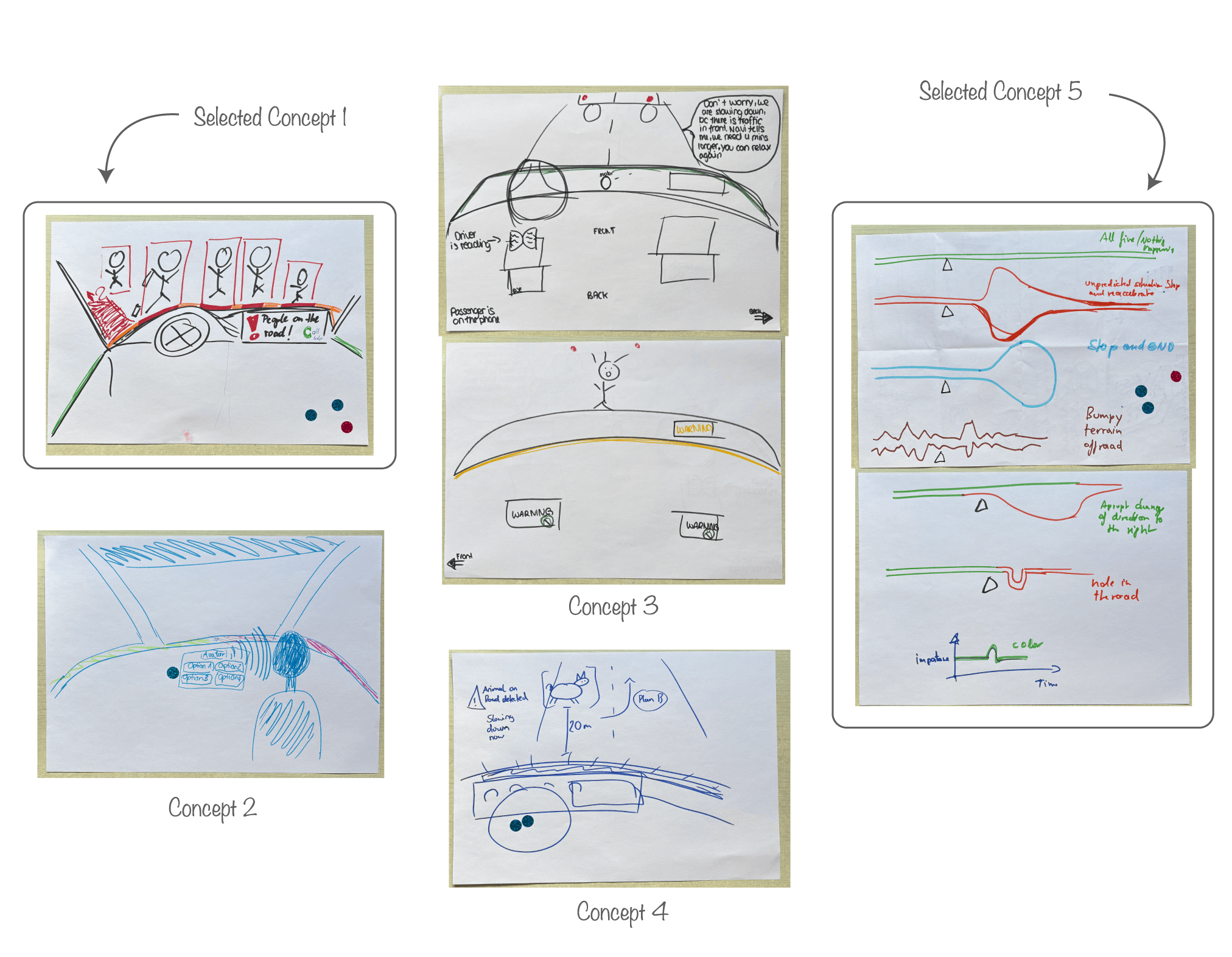
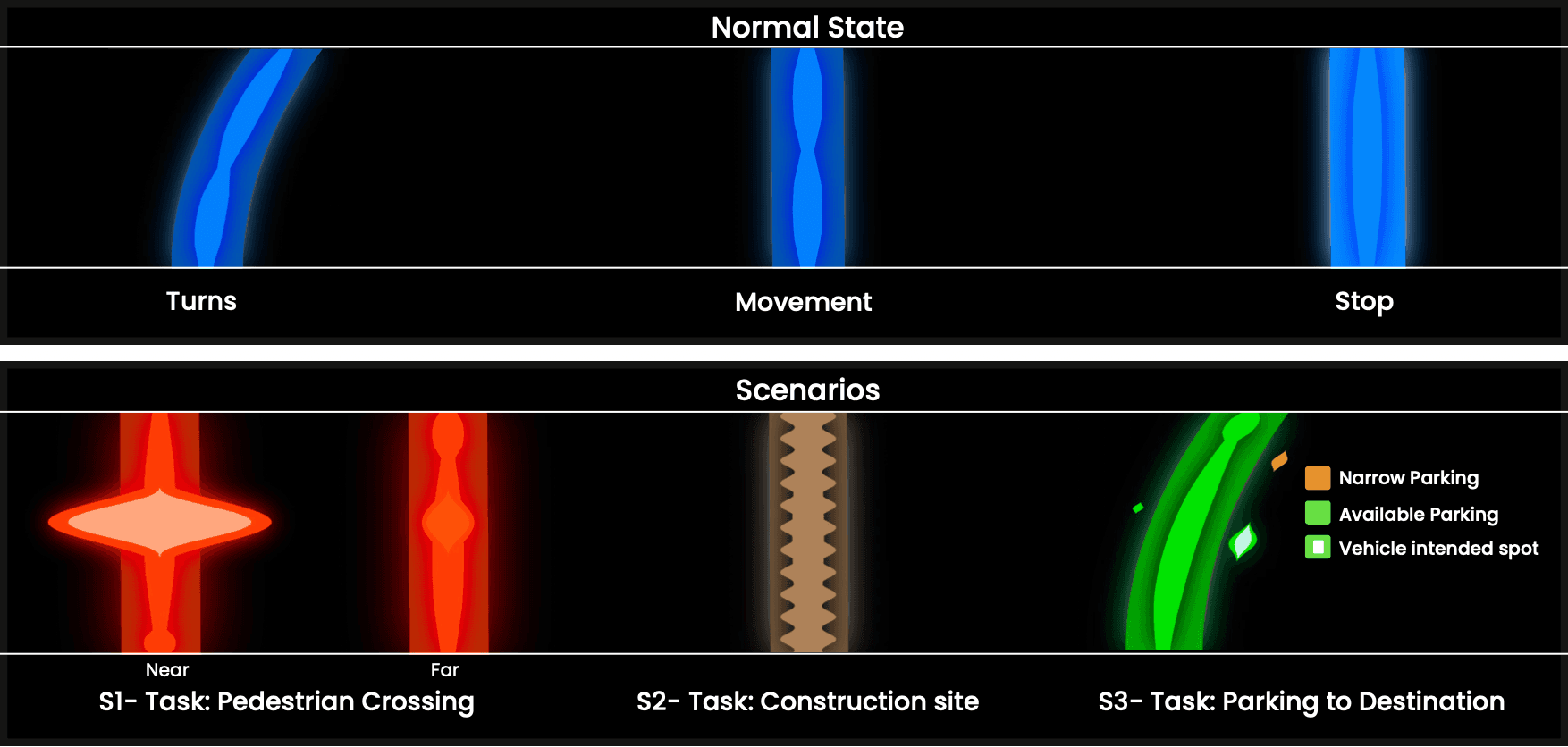
Iteration and Final Developed Scenarios
Iteration and Final Developed Scenarios
The initial concept was further refined from a horizontal to a vertical orientation to better align with the motion of the automated vehicle. Based on this final design, we developed and tested multiple user scenarios to evaluate interaction, situational awareness, and overall user experience.
The initial concept was further refined from a horizontal to a vertical orientation to better align with the motion of the automated vehicle. Based on this final design, we developed and tested multiple user scenarios to evaluate interaction, situational awareness, and overall user experience.
The initial concept was further refined from a horizontal to a vertical orientation to better align with the motion of the automated vehicle. Based on this final design, we developed and tested multiple user scenarios to evaluate interaction, situational awareness, and overall user experience.
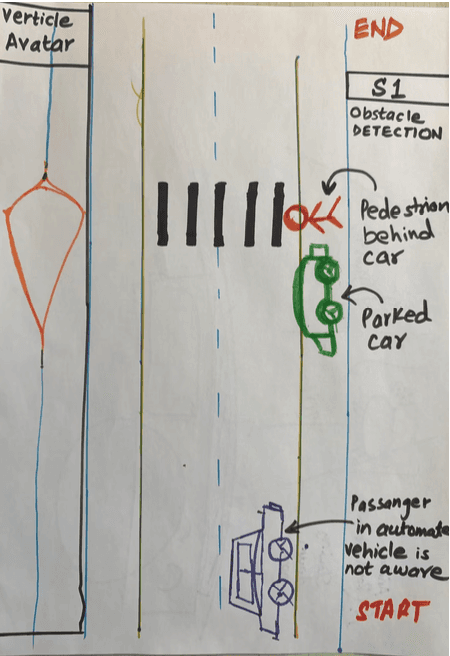
Task 1: Pedestrian Crossing
The vehicle detects the pedestrian behind another parked vehicle and represents in oranger color with distance representation.
The vehicle detects the pedestrian behind another parked vehicle and represents in oranger color with distance representation.
The vehicle detects the pedestrian behind another parked vehicle and represents in oranger color with distance representation.
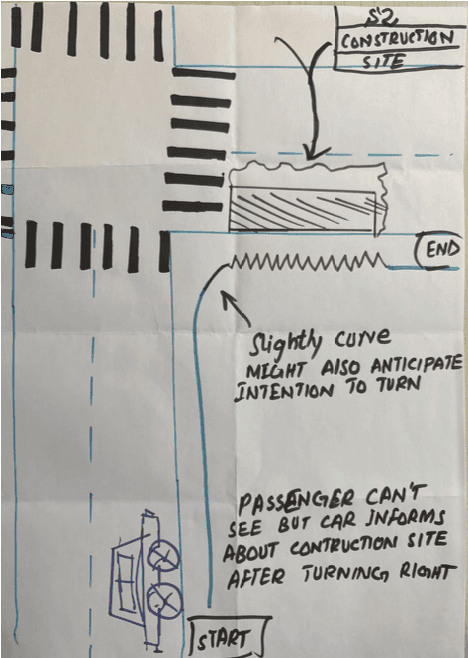
Task 2: Construction site
The vehicle detects the construction side during turn and represents in brown color with zigzag patterns.
The vehicle detects the construction side during turn and represents in brown color with zigzag patterns.
The vehicle detects the construction side during turn and represents in brown color with zigzag patterns.
Task 3: Parking to Destination
The vehicle detects the normal and narrow parkings in green color and intended parking with a clear white glow.
The vehicle detects the normal and narrow parkings in green color and intended parking with a clear white glow.
The vehicle detects the normal and narrow parkings in green color and intended parking with a clear white glow.
Final Ambient Avatar Concept
Final Ambient Avatar Concept
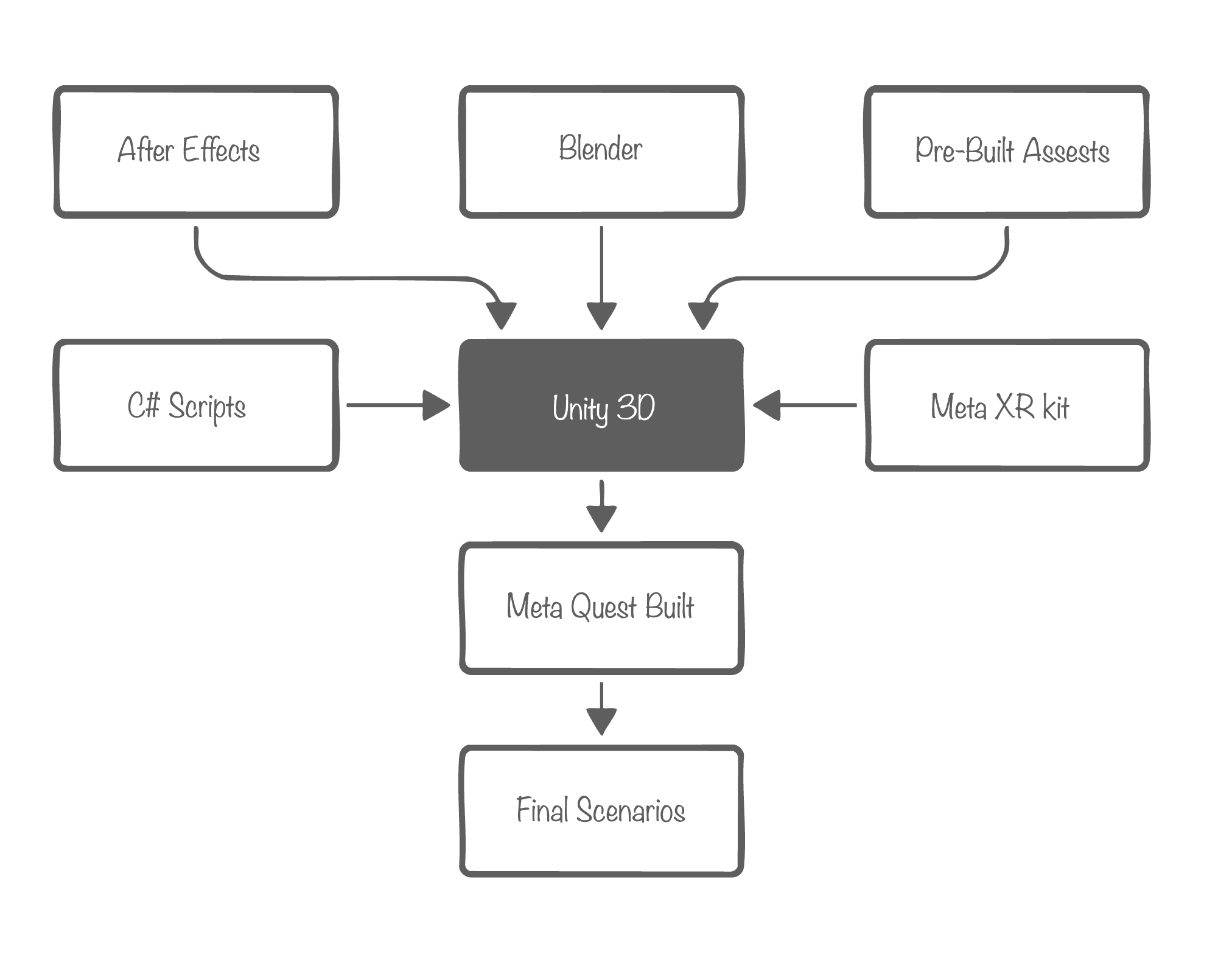
Development Flowchart
Development Flowchart
User Testing
User Testing
User Testing
Study Design
Study Design
Users
Users
Users
84 Participants
84 Participants
84 Participants
Experiment
Experiment
Experiment
Between Subject Design
Between Subject Design
Between Subject Design
DVs
DVs
DVs
SA, UX, Trust, Presence, RT
SA, UX, Trust, Presence, RT
SA, UX, Trust, Presence, RT
IVs
IVs
IVs
Avatar (No, Yes) World (VR, MR)
Avatar (No, Yes) World (VR, MR)
Avatar (No, Yes) World (VR, MR)
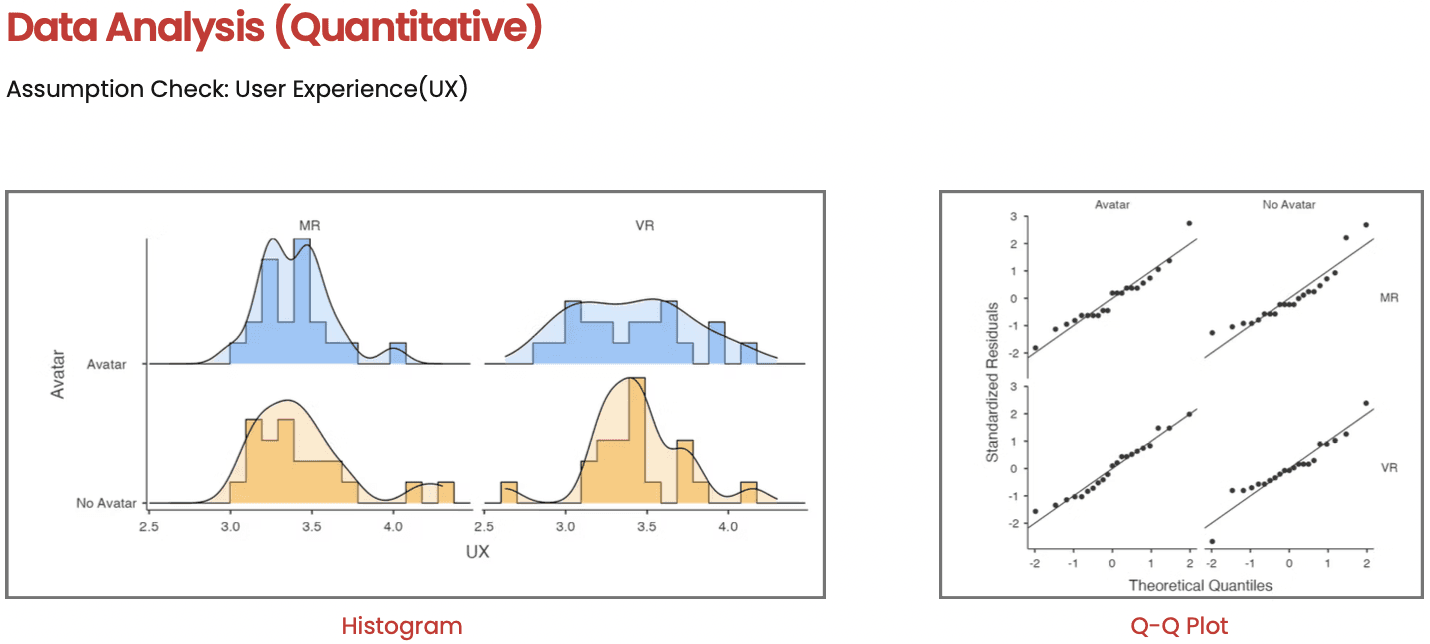
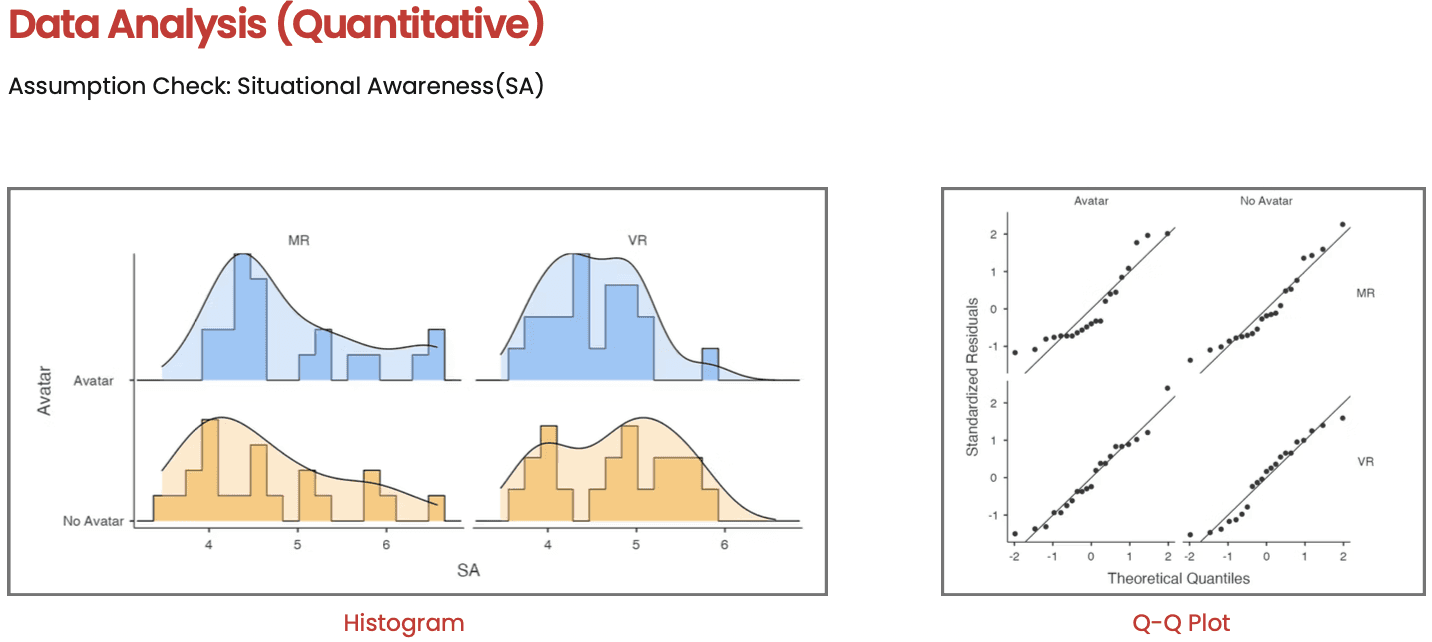
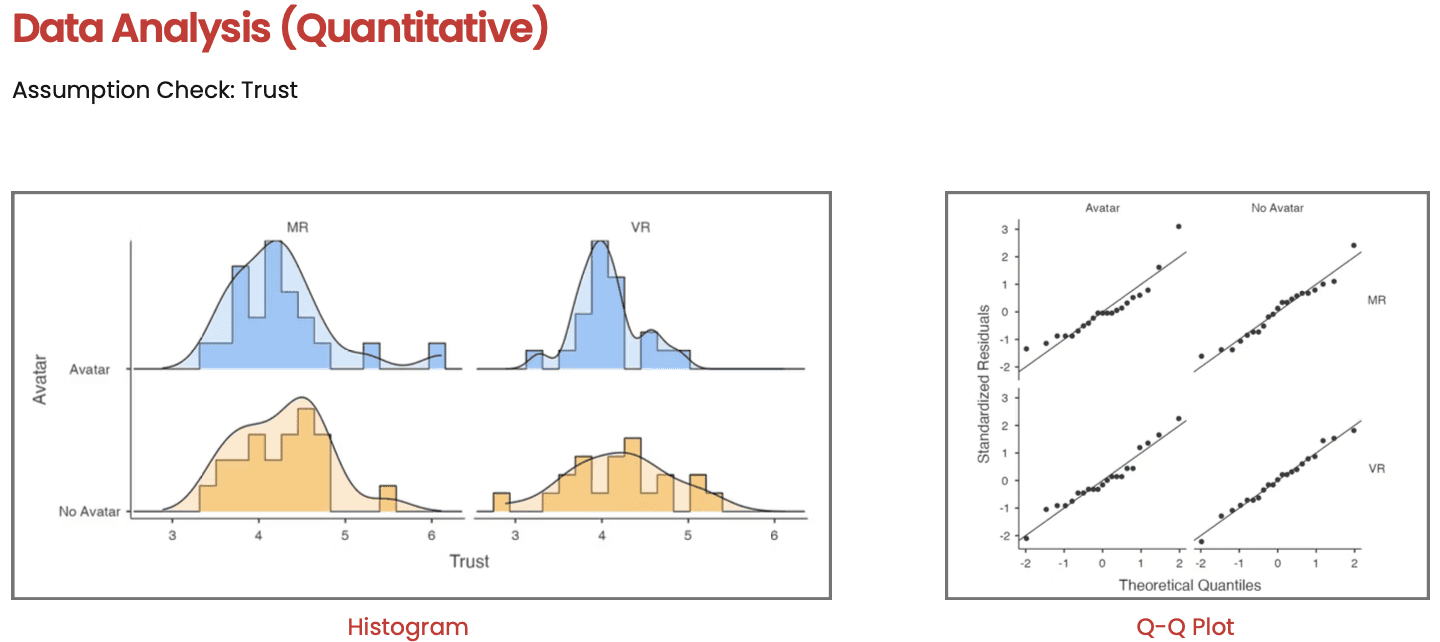
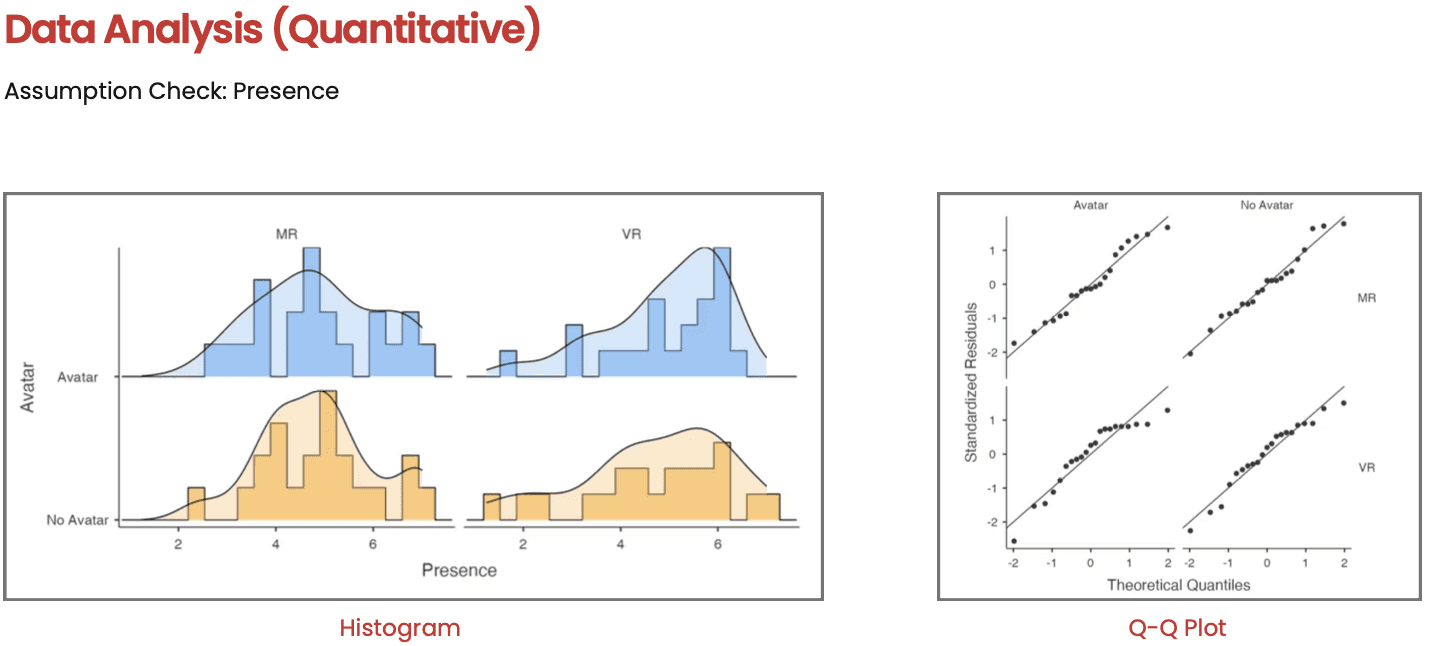
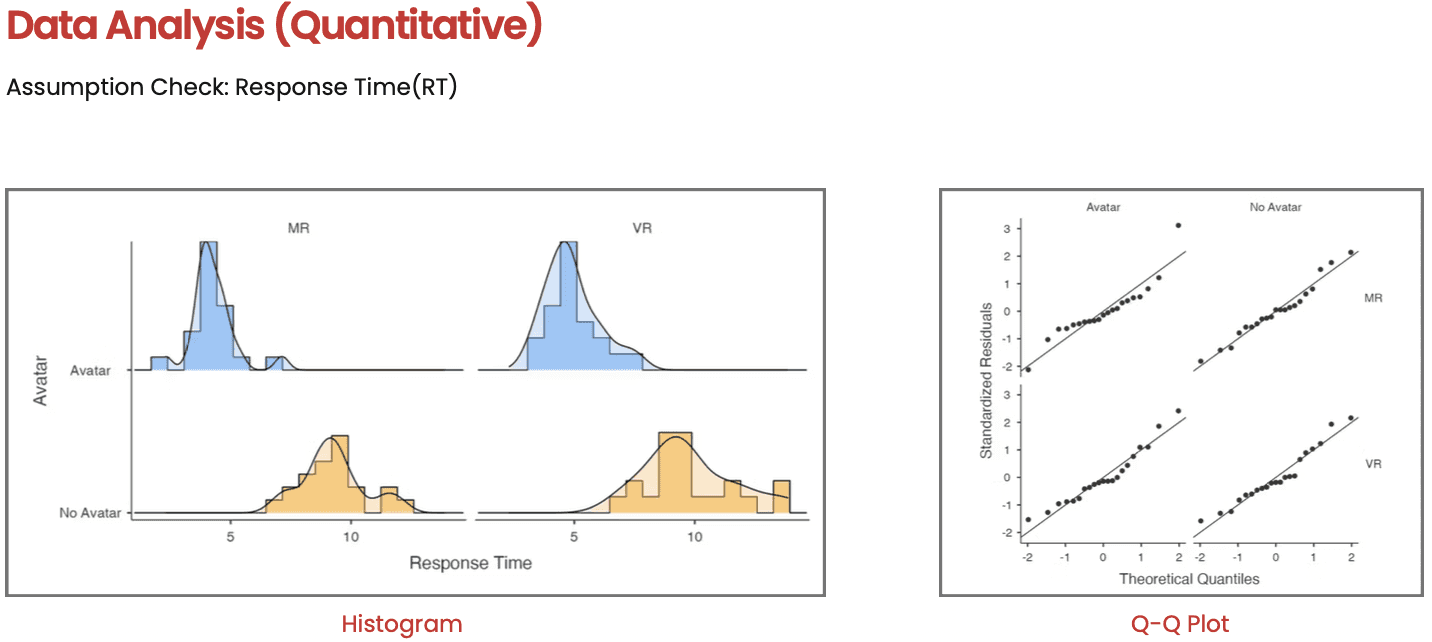
Data Analysis Methods
Data Analysis Methods
Data Analysis Methods
Impacts
Impacts

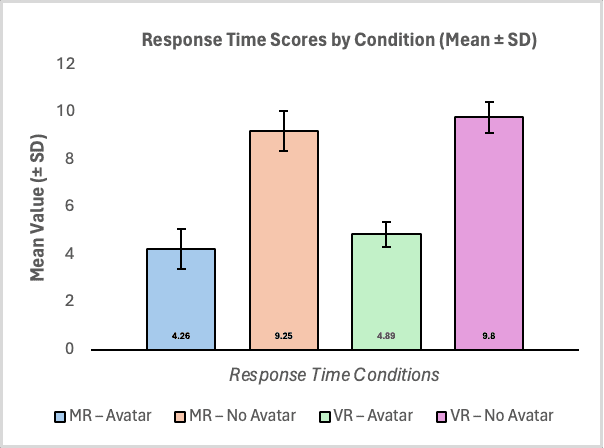
Faster reactions with an ambient avatar
Faster reactions with an ambient avatar
Users reacted faster to critical events when the ambient avatar was present, in both VR and MR conditions, compared to a no-avatar baseline.
Users reacted faster to critical events when the ambient avatar was present, in both VR and MR conditions, compared to a no-avatar baseline.
Users reacted faster to critical events when the ambient avatar was present, in both VR and MR conditions, compared to a no-avatar baseline.
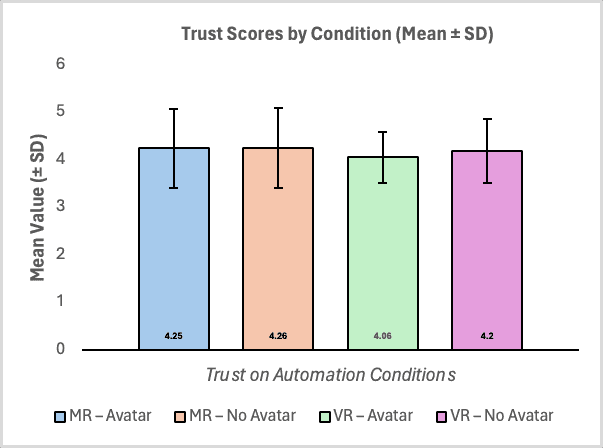
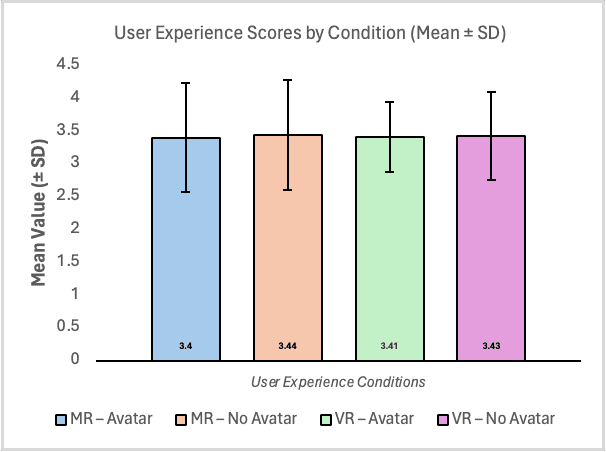
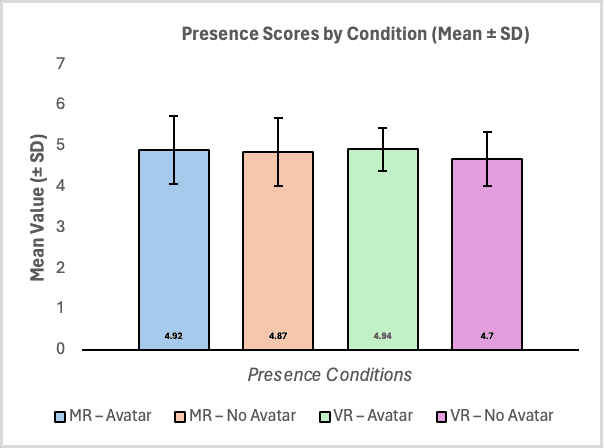
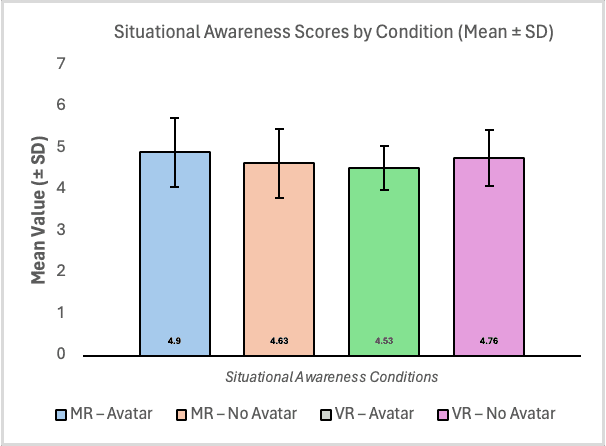

No Changes in Subjective Experience
No Changes in Subjective Experience
Self-reported trust, UX, situational awareness, and immersion scores did not differ significantly between avatar and no-avatar conditions.
Self-reported trust, UX, situational awareness, and immersion scores did not differ significantly between avatar and no-avatar conditions.
Self-reported trust, UX, situational awareness, and immersion scores did not differ significantly between avatar and no-avatar conditions.
Design Implication
Design Implication
The findings indicate that ambient, non-human avatars can support faster reactions in automated driving scenarios present companions that quietly enhance safety without overwhelming the passenger experience.
The findings indicate that ambient, non-human avatars can support faster reactions in automated driving scenarios present companions that quietly enhance safety without overwhelming the passenger experience.
The findings indicate that ambient, non-human avatars can support faster reactions in automated driving scenarios present companions that quietly enhance safety without overwhelming the passenger experience.
Limitations
Limitations
Single-Modality Interaction.
Controlled Lab Setting.
Sample Size Constraints.
Short-Term Exposure.
Limited Diversity in User Pool.
Single-Modality Interaction.
Controlled Lab Setting.
Sample Size Constraints.
Short-Term Exposure.
Limited Diversity in User Pool.
Single-Modality Interaction.
Controlled Lab Setting.
Sample Size Constraints.
Short-Term Exposure.
Limited Diversity in User Pool.
Future Works
Future Works
Explore Multimodal Avatars.
Field Testing in Real Vehicles.
Scalability and Avatar Personalization.
Broader Demographics.
Cognitive Load Assessment.
Explore Multimodal Avatars.
Field Testing in Real Vehicles.
Scalability and Avatar Personalization.
Broader Demographics.
Cognitive Load Assessment.
Explore Multimodal Avatars.
Field Testing in Real Vehicles.
Scalability and Avatar Personalization.
Broader Demographics.
Cognitive Load Assessment.

Takeaways
Takeaways
This research, planned for publication at the HCI Conference, showcases a user-centered approach to designing ambient avatars in autonomous vehicles.
This research, planned for publication at the HCI Conference, showcases a user-centered approach to designing ambient avatars in autonomous vehicles.
This research, planned for publication at the HCI Conference, showcases a user-centered approach to designing ambient avatars in autonomous vehicles.